Zeki ajanlar yapay zeka çalışmalarında önemli bir role sahiptir. Bu ajanlar, çevrelerini algılayıp, bu algılamaya dayanarak eylemler gerçekleştiren sistemlerdir. Bu yazıda, zeki ajanların yapısı, çeşitleri ve işleyiş prensipleri ele alınacaktır.
Ajan Nedir?
Bir ajan, sensörler aracılığıyla çevresini algılayan ve aktüatörler (eyleyiciler) ile çevresi üzerinde etkide bulunan herhangi bir sistemdir.
- İnsan ajanları: Gözler, kulaklar gibi organları sensör; eller, bacaklar gibi organları aktüatör olarak kullanır.
- Robotik ajanlar: Kameralar ve kızılötesi sensörler ile çevresini algılar; çeşitli motorlar ile çevresi üzerinde etkide bulunur.
Ajanlar ve Çevreleri
Ajanlar, algılama dizilerinden eylemlere bir fonksiyon oluşturur. Bu fonksiyon, ajanın çevreyi nasıl algıladığına bağlı olarak gerçekleştireceği eylemi belirler. Bir ajanın tasarımı şu iki ana unsurdan oluşur:
- Ajan fonksiyonu: Algılama dizilerini eylemlere haritalayan fonksiyondur.
- Ajan programı: Ajan fonksiyonunu gerçekleştiren fiziksel yapıdır.
Örnek: Elektrikli süpürge dünyası
Algılar (percepts): konum ve içindekiler [kirli gibi]
Aksiyonlar (actions): Sol, sağ, emmek, durmak gibi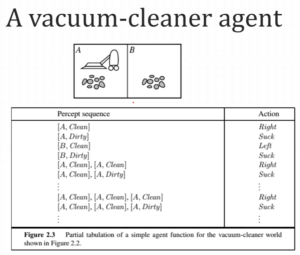
Rasyonel Ajanlar
Bir rasyonel ajan, algıladıkları ve gerçekleştirebileceği eylemler doğrultusunda “doğru” olanı yapmaya çalışır. Ajanın performansı, belirli kriterlere göre ölçülür:
- Performans kriteri, ajanın başarısını belirleyen nesnel bir ölçüdür. Örneğin, bir elektrikli süpürge aracının performans ölçüsü temizlenen kir miktarı, harcanan zaman olabilir, tüketilen elektrik miktarı, gürültü miktarı üretilir, vb.
- Rasyonellik, ajanın sahip olduğu bilgileri toplayıp kullanarak en yüksek başarıyı sağlamayı amaçlar.
- Bir ajan, kendi deneyimlerine dayanarak öğrenip uyum sağlayabiliyorsa otonomdur.
PEAS Çerçevesi
Ajan tasarımını değerlendirirken PEAS (Performance, Environment, Actuators, Sensors) çerçevesi kullanılır:
- Performans ölçütü: Ajandan beklenen başarı kriterleri.
- Çevre: Ajanın içinde bulunduğu ortam.
- Aktüatörler: Ajanın çevresi üzerinde etkide bulunabileceği araçlar.
- Sensörler: Ajanın çevresini algıladığı araçlar.
Peas Example:
Ajan tipi (agent type): Ambulans sürücüsü
Performans ölçüsü (performance measure): Güvenli sürüş, uygun hızlı sürüş, hastaya ve personellere konforlu seyahat sunma
Çevre (enviroment): Yollar, diğer trafikteki araçlar, yayalar, hasta, personeller
Sensörler (sensors): Araç kamerası, gps, motor sensörü, hız sensörü, kulak, göz
Çevre Türleri
Ajanlar, farklı türde çevrelerde çalışabilir. İşte bazı çevre türleri:
- Tam gözlemlenebilir (fully vs partially observable): Ajan, çevrenin tüm durumlarını her an algılayabilir. Satranç tamamen gözlemlenebilir bir oyundur. Oyuncular, tahtadaki tüm taşların pozisyonunu her zaman görebilir. Gizli bilgi veya belirsizlik yoktur; oyunun tüm durumu anbean her iki oyuncu tarafından tamamen gözlemlenebilir. Poker oyunu kısmen gözlemlenebilir (partially observable) bir oyun örneğidir. Her oyuncu kendi kartlarını bilir, ancak rakip oyuncuların ellerindeki kartlar gizlidir. Bu nedenle oyuncular eksik bilgiyle hareket eder ve strateji oluştururken tahminlerde bulunur.
- Belirleyici (deterministic vs stochastic): Bir ajanın gerçekleştirdiği eylem, çevrenin bir sonraki durumunu tamamen belirler. Satranç, tamamen belirleyici bir oyundur. Bir oyuncunun yaptığı hamleler, oyunun sonraki durumunu kesin olarak belirler. Herhangi bir olasılıksal unsur (zar veya rastgele olaylar gibi) bulunmaz. Eğer bir piyonu bir kare ileri sürerseniz, bu hareketin sonucu her zaman aynı olacaktır. Poker oyunu, olasılıklı bir çevre örneğidir. Bir oyuncu ne kadar iyi strateji kurarsa kursun, kartların rastgele dağıtılması nedeniyle şans her zaman devrededir. Bu, aynı stratejiyi uygulayan bir oyuncunun her oyunda farklı sonuçlar alabileceği anlamına gelir.
- Episodik (episodic vs sequantial): Ajanın deneyimleri bağımsız bölümler halinde gelir ve her bölümdeki eylemi yalnızca o bölüme bağlıdır. (örneğin endüstriyel robotlar ve satranç). Sekansiyel (sequential) deneyimlere örnekde, sürücüsüz bir arabanın trafik içinde hareket etmesidir. Bu durumda, araba her adımda aldığı kararların sonucunu, sonraki adımlarda dikkate almak zorundadır.
- Statik/Dinamik (static vs dynamic): Ajanın çevresi değişmiyorsa statik, değişiyorsa dinamiktir. Statik çevrede örneğin satranç tahtası ve taşların pozisyonları oyun sırasında oyuncular tarafından değiştirilir, ancak çevrenin kendisi (tahta, taşlar, kurallar) sabittir. Zaman veya dış etkenler tahtadaki durumu değiştirmez. Ama dinamik çevrede mesela çevrimiçi çok oyunculu bir oyunda, diğer oyuncuların veya oyun içi mekanizmaların (hava durumu, olaylar) eylemleri oyunun çevresini sürekli olarak değiştirir.
- Tek ajan/Çok ajan (single vs multi agent): Bir ajanın yalnız çalıştığı veya diğer ajanlarla etkileşimde bulunduğu durumlar. Örneğin yalnız çalışan robot kol single ajandır. Bir üretim hattındaki robot kol, belirli bir işi yerine getirirken (parça monte etmek veya taşımak gibi) tek başına çalışır ve diğer robotlarla doğrudan bir etkileşimi yoktur. Multi agentda ise örneğin satrançta iki oyuncu vardır ve bu oyunu çok ajanlı bir örnek yapar. Her iki oyuncu da (veya yapay zekalar) birbirlerinin hamlelerini hesaba katarak strateji geliştirmeye çalışır. Yani ajanlar rekabet halindedir.

Gerçek dünya kısmen gözlemlenebilir, stokastik, sıralı, dinamik, sürekli ve çok aktörlüdür.
Ajan Türleri
Ajanlar beş ana tipe ayrılır:
- Basit refleks ajanlar: Sadece mevcut algıya dayanarak eylem gerçekleştirirler, önceki algıları dikkate almazlar. Örneğin basit bir ışık takip eden robot, sensörleri aracılığıyla sadece mevcut anda ışığı algılar ve ışığın olduğu yöne doğru hareket eder. Geçmişte ışığın nerede olduğu, ya da daha önceki adımları nasıl attığı önemli değildir; yalnızca şu anki ışık kaynağına tepki verir.
- Model tabanlı refleks ajanlar: Kısmi gözlemlenebilirlik durumunda, algılayamadıkları çevre durumlarını da dikkate alarak hareket ederler. Örneğin bir otonom araç, çevresinde her zaman tüm bilgiyi algılayamaz. Yolun ilerideki bölümlerini veya diğer araçların tam yerlerini göremeyebilir. Ancak aracın, yol kuralları ve diğer araçların davranışları hakkında sahip olduğu bir içsel model vardır. Bu model, aracın hangi hızda gitmesi gerektiği, olası bir yaya geçişi durumu ya da kavşakta diğer araçların nasıl hareket edeceği konusunda tahmin yapmasına olanak tanır. Araç, bu modele dayanarak gelecekteki durumu tahmin eder ve güvenli bir sürüş sağlar.
- Hedef tabanlı ajanlar: Ajanlar, mevcut çevre durumuna ek olarak bir hedefe ulaşmayı amaçlar. Örneğin bir otonom araç, yalnızca çevredeki anlık durumlara tepki vermekle kalmaz (trafik ışıkları, yayalar, diğer araçlar gibi), aynı zamanda belirli bir hedefe (varış noktasına) ulaşmaya çalışır. Araç, rotasını belirlerken hem anlık olarak aldığı çevre bilgilerini (yol durumu, engeller, trafik yoğunluğu) hem de varmak istediği hedefi göz önünde bulundurur. Hedef tabanlı olduğu için, aracın amacı, belirli bir konuma en güvenli ve en hızlı şekilde ulaşmaktır.
- Fayda tabanlı ajanlar: Ajanlar sadece bir hedefe ulaşmakla kalmaz, bu hedefe en iyi şekilde ulaşmayı hedefler (daha hızlı, daha güvenli, daha az maliyetli vb.). Örneğin bir otonom araç, sadece hedefe ulaşmaya çalışmakla kalmaz, aynı zamanda bu hedefe en hızlı ve en güvenli şekilde ulaşmayı hedefler. Aracın fayda fonksiyonu, trafik durumu, yolun uzunluğu, güvenlik durumu ve yakıt tüketimi gibi faktörleri göz önünde bulundurur. Örneğin, hedefe ulaşırken bir rota trafiğe takılıp zaman kaybettirebilirken, başka bir rota daha güvenli ve kısa olabilir. Fayda tabanlı ajan, bu farklı seçenekleri değerlendirir ve en fazla fayda sağlayan rotayı seçer.
Öğrenen ajanlar: Kendi deneyimlerine dayanarak bilgi toplar ve bu bilgiyi gelecekteki kararlarında kullanır. Bu ajanlar, performanslarını sürekli geliştirir. Örneğin otonom araçlar, sürüş esnasında çevreleri hakkında sürekli bilgi toplar ve deneyim kazandıkça daha iyi kararlar verebilir hale gelirler. Aracın yapay zekası, farklı hava koşulları, trafik yoğunluğu ve yol yapıları gibi çeşitli koşullarda araç kullanmayı öğrenir. Mesela, bir önceki sürüş sırasında zorlandığı bir kavşakta, gelecekteki sürüşlerinde daha iyi kararlar almak için topladığı verileri kullanır.
Bu yazıda, ajanların yapısı, rasyonel ajanların işleyişi, PEAS çerçevesi ve çevre türleri ve ajan türleri hakkında bilgi verdim.
Bir sonraki yazıda, yapay zekada arama ile problem çözme konusuna geçeceğiz.